紹介動画
特徴づけられた磁界によるエンコーダの新しい絶対位置計測手法の提案
近年、産業用ロボットの販売台数は増加傾向にあり、ロボットが様々な動きを実現することが求められている。そして高精度な制御には、角度情報を取得するエンコーダの精度が重要な役割を果たす。磁気式エンコーダは塵埃や油に強く、過酷な環境に耐えうるデバイスとして多様な汎用先が期待される。一方、分解能が光学式エンコーダに比べ劣るため、分解能の向上が課題である。
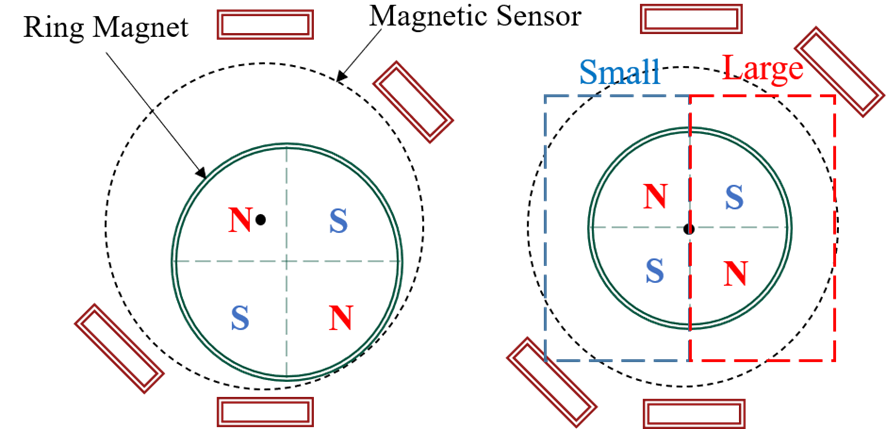
磁気式エンコーダの分解能を向上させるためにはマグネットの多極化が有効である。しかし、多極化に伴い絶対角度が算出できなくなる。そこで本研究室では、特徴づけられた磁界を利用した新しい磁気式アブソリュートエンコーダを開発している。中心軸からずらしてマグネットを回転させる偏心型や磁極対ごとに磁束密度が異なるマグネットを回転させる磁力差型を提案し、磁気式エンコーダで高精度な絶対角度算出を目指している。
山本 航大, 大友 一輝, 橋本 秀紀, 偏心構造を用いた磁気式アブソリュートエンコーダの開発, 電気学会論文誌D(産業応用部門誌), 2018, 138 巻, 12 号, p. 920-925, 公開日 2018/12/01, Online ISSN 1348-8163, Print ISSN 0913-6339
Shota Komatsuzaki, Akishi Takeyama, Keita Sado, Yuki Nagatsu and Hideki Hashimoto(小松崎翔太, 竹山耀之, 佐渡啓太, 長津裕己, 橋本秀紀),“Absolute Angle Calculation for Magnetic Encoder Based On Magnetic Flux Density Difference”, IECON2021-47th Annual Conference of the IEEE Industrial Electronics Society
Kodai Yamamoto, Kazuki Otomo, Hideki Hashimoto, Development of Absolute Magnetic Rotary Encoder with Eccentric Rotation, IEEJ Journal of Industry Applications, 2019, 8 巻, 6 号, p. 991-996, 公開日 2019/11/01, Online ISSN 2187-1108, Print ISSN 2187-1094
偏心型磁気式アブソリュートエンコーダ
モータの高精度な制御には、角度情報を取得するエンコーダの精度が非常に重要な役割を果たす。磁気式エンコーダは塵埃や油に強く、過酷な環境に耐えうるデバイスとして多様な汎用先が期待される。一方、分解能が光学式エンコーダに比べ劣るため、分解能の向上が課題である。
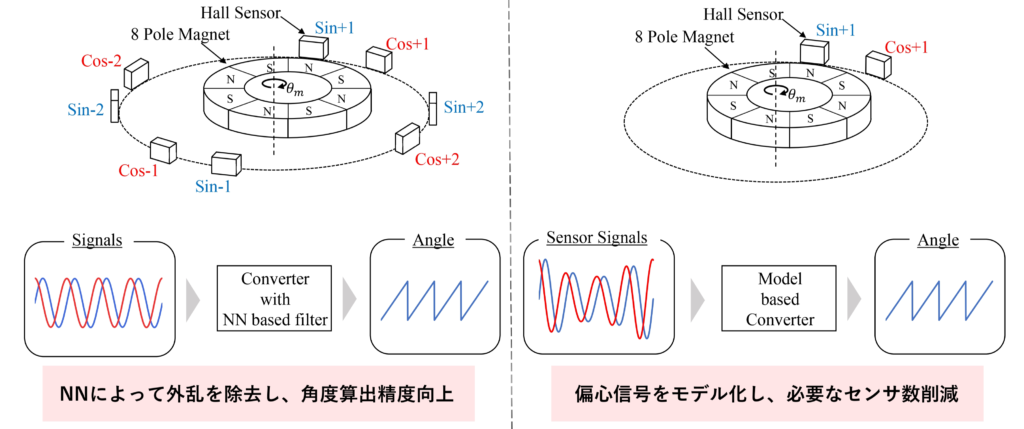
磁気式エンコーダの分解能を向上するためにはマグネットの多極化が有効である。しかし、多極化に伴い絶対角度が算出不可能になる。そこで、本研究室では偏心型磁気式アブソリュートエンコーダを開発している。マグネットを偏心回転させることで信号を特徴づけ、その特徴から絶対角度を算出することができる。
さらに、ニューラルネットワークを用いてオンラインで外乱を推定し、除去することで更なる高精度化を実現した。また、偏心型の信号をモデリングすることで、内部センサ数を削減しても絶対角度算出を可能にする手法を提案した。
Akishi Takeyama, Shota Komatsuzaki, Takashi Ohhira, Hideki Hashimoto, “Levenberg-Marquardt method based Precise Angle Estimation for Eccentric Magnetic Absolute Encoders,” IEEE International Conference On Mechatronics (ICM2023), March 2023.
竹山耀之, 小松崎翔太, 大平峻, 橋本秀紀, “ADALINE Neural Network を用いた偏心型磁気式アブソリュートエンコーダの開発”, 第23回計測自動制御学会システムインテグレーション部門講演会(SI2022), 3P2-A17, 2022.12, 千葉.
モータの高トルク化に関する研究
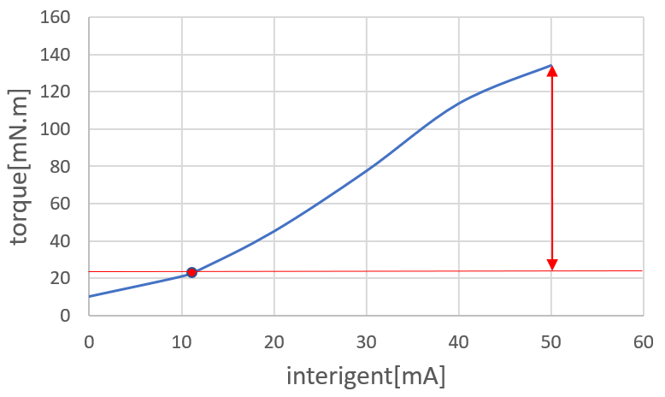
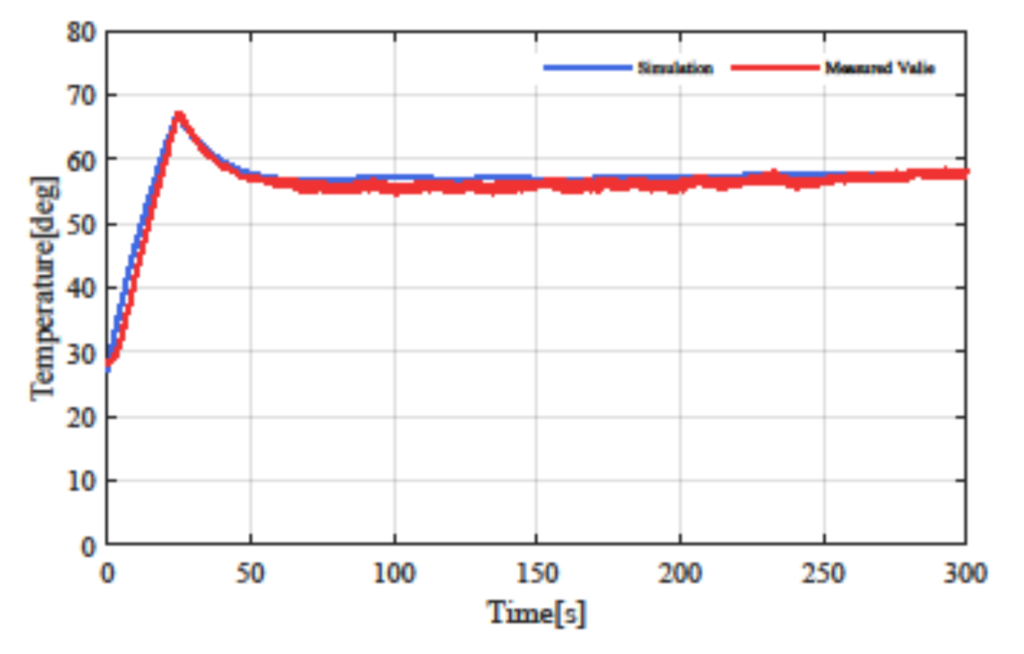
モータ技術は電気-機械エネルギー変換の要として日々発展を繰り返しており、今日ではロボットや自動車など幅広い分野で活用されている。このような応用分野の発展とともに、モータに課せられる要求は増大し、高トルク化がモータ技術の重要な要素として扱われる。本研究室ではモータのコイル温度に着目し、温度による制限を設けることで従来よりもモータに多くの電流が流れ、高トルク化を実現している。一方、モータ内部により多くの熱が発生してしまうといった問題があり、それによってモータの破損につながってしまう。そのため、リアルタイムでコイルの温度を取得する必要がある。モータ内部に温度センサを設置することで温度情報を取得できるが、モータ内部にはロータやステータなどがあり直接温度センサを近づけることは困難である。そこで、モータ外部に温度センサを設置し、熱伝導・熱伝達を用いてモータ内部に温度センサを設置することなく、リアルタイムでの温度情報を取得することが可能となった。
PMSMセンサレス制御の高精度化に関する研究
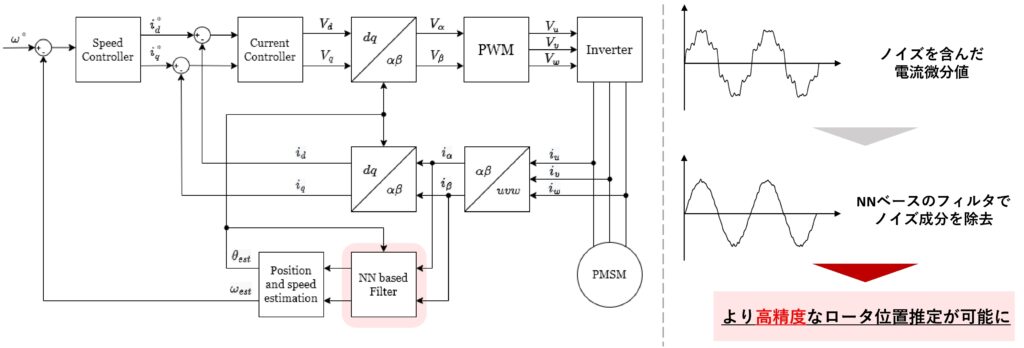
永久磁石同期モータ(PMSM:Permanent Magnet Synchronous Motor)は、高効率・高出力密度・低騒音などの特徴から、家電製品、自動車など様々なものに用いられている。PMSMを制御する際には、ロータの磁極位置に応じて電流や電圧を制御する必要があるため、通常は位置センサを用いて磁極位置を測定している。しかし、位置センサを用いることによって、コストの増大、設置不良、故障などによる信頼性の低下、スペースの増加などの問題が発生する。
これらの問題を解決するために、本研究室では、位置センサの代わりに、電流の微分値情報をもとに、磁極位置を推定するセンサレス制御法の研究を行っている。磁極位置推定の誤差低減のため、ニューラルネットワークベースのフィルタを用いて外乱成分を除去することにより、センサレス制御の高精度化を実現する。