紹介動画
倒立二輪ビークルを用いた研究
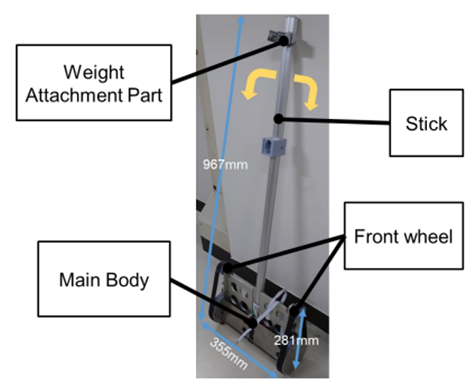
人間の生活圏に適した形状で階段環境を自由に移動できるロボットを実現することを目標に階段昇降ロボットの研究開発を行っている。従来の階段昇降ロボットは大きな重量かつ複雑な構成のものが多いという弱点がある。そこで本研究で使用するロボットは
・高い運動性能
・比較的軽量
・単純な構成で低コスト
の3つを満たす階段昇降ロボットの実現を目指している。 また、本ロボットは側面部分がない階段であっても階段昇降可能であるという特徴がある。平面走行時は前輪を上げて倒立二輪として走行し、階段昇降時は、杖の部分を傾けて階段との接触点直上に重心を移動させることで昇降可能な状態へ移行する。
板垣郁弥, 松原央尭, 石井眞二, 長津裕己, 橋本秀紀, “重心移動を用いた階段昇降機能を有するロボットの提案”, ロボット・メカトロニクス講演会2021, 2A1-G0
板垣郁弥, 大平峻, 橋本秀紀, “重心移動型階段昇降ロボットの移動制御に関する研究”, 第40回日本ロボット学会学術講演会, 1C1-03
長田宗一郎, 板垣郁弥, 長津裕己, 橋本秀紀, “非線形モデル予測制御のクローラータイプ階段昇降ロボットへの適用に関する研究”, ロボティクス・メカトロニクス講演会2022 in Sapporo
人間協調型倒立二輪ビークルを用いた研究
近年、少子高齢社会による労働力不足が問題となっており、仕事・生活の 補助を行うロボットを実社会に導入する動きが推進されている。特に階段への対処できるロボットの導入の必要性が指摘されており、人間の力を利用して人間とロボットがお互いの強みを生かした人間協調ビークルが求められている。そこで、階段昇降可能な人間協調型倒立二輪ビークルの研究を行っている。

また、人間協調型ビークルの必要な人の力の低減も行っている。さらに筋電位などの生体信号を用いて人間協調型ビークルの強化も行っている。
長屋佳寿, 大平峻, 橋本秀紀, “倒立二輪型ビークルの階段乗り上げ時の運動解析”, 第40回日本ロボット学会学術講演会, 1C1-05
長屋佳寿, 長津裕己, 橋本秀紀, “人間と協調する倒立二輪型ビークルの階段乗り上げ手法に関する研究”, ロボティクス・メカトロニクス講演会2022 in Sapporo
田中康斗,長屋佳寿,長津裕己, 橋本秀紀, “倒立二輪ビークルの人間追従に関する手法の提案”, ロボティクス・メカトロニクス講演会2022 in Sapporo
トランスフォームを用いた階段昇降ロボットの研究開発
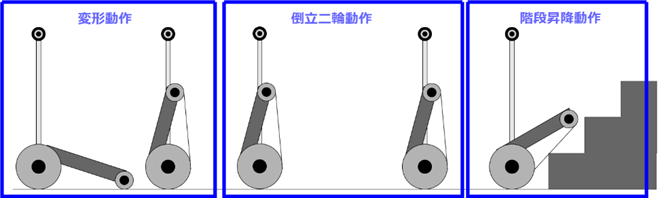
自律及び人間と強調する移動ロボットの研究開発を行っている。本ロボットは倒立二輪モードと四輪モードの二種類のモードを持つ。それぞれは以下の特徴を持つ。
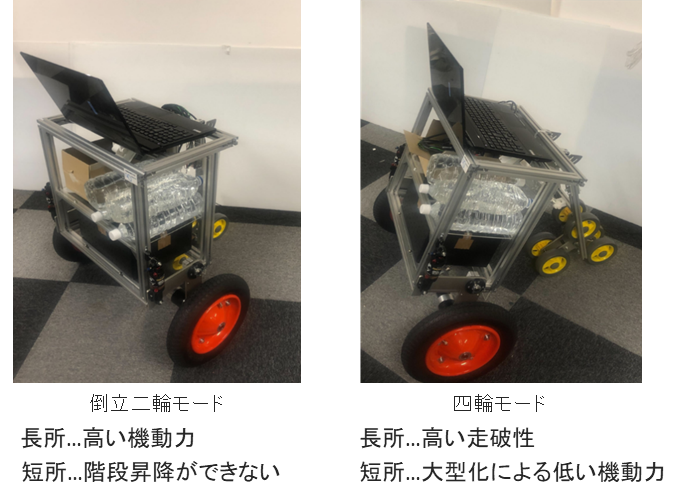
平坦な場では機動性に優れた倒立二輪走行を行い、階段昇降時には四輪に変形する。状況に合わせて変形を行い、それぞれのモードの短所をそれぞれの長所で補い合うことでどのような状況でも走行可能になる。荷物を搬送し、階段昇降時には自律モードと人間と協調するモードを実装した。
路通, 長津裕己, 橋本秀紀, “変形車体を用いた階段昇降ロボットの提案”, ロボティクス・メカトロニクス講演会2022 in Sapporo
鈴木剛, 路通, 長津裕己, 橋本秀紀, “トライスターホイールを用いたロボットによる階段降下に関する検討”, ロボティクス・メカトロニクス講演会2022 in Sapporo
Tong Lu, Fumiya Itagaki, Yuki Nagatsu and Hideki Hashimoto, “Dynamics and transformation control of a wheeled inverted pendulum mobile robot,” 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2022, pp.463-468