研究期間2020年4月-2022年3月
研究概要
本研究では、少子高齢化での労働力不足を念頭に、機械が人間と協調して人間の労力を低減し効率を高めるための移動支援(モビリティアシスト)技術を研究開発するものである。曲がりくねった道、細い道、坂道、段差、階段といった日常環境を対象とし、買い物や荷物搬送を容易にする技術が求められている。本研究では、最も難度の高い階段昇降を対象として、倒立2輪型ビークルをベースに、自律階段昇降、人間と協調した階段昇降、を実現する移動ロボットを試作開発し、荷物搬送における支援技術を研究開発した。
重心移動を用いた動的階段昇降機能を有する
倒立二輪型ロボットの研究

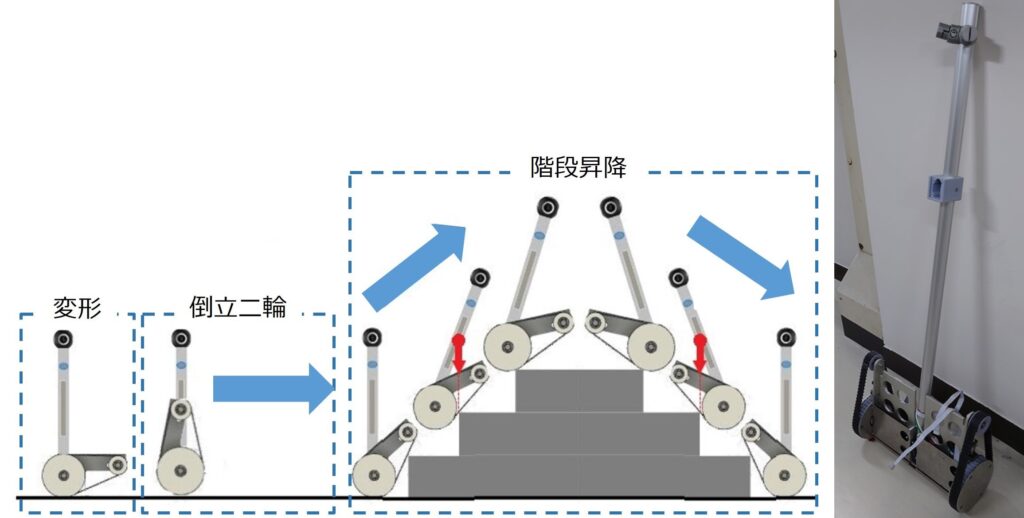
トランスフォームを用いた階段昇降ロボットの研究開発


人間協調により階段昇降を行う倒立二輪型ビークルに関する研究


評価に関して